

產品下載
.png)
產品特點
荷重元重量顯示器 ZB4000
-
類型與電源:荷重元專用顯示器,DC-10-36V 寬電壓電源
-
高精度測量:20位分度,採集速度可選,支援 ±3mV/V 輸入。
-
多元輸出:±10V 或 4–20mA 模擬輸出,2 入 4 出開關量控制。
-
智能功能:支援清零、上下限比較、峰谷值捕捉、非線性修正。
-
通訊能力:RS485 接口,支援 Modbus-RTU 與主動發送,通訊參數可調。
-
操作與校準:三鍵操作介面,支援密碼保護、硬體/數字/砝碼校準。
產品規格
1. 主要功能及技術參數
1.1 測量性能 : 20 位分度,採集速度 10 次 20 次或 80 次,輸入信號±3mv/v.1.2 變送輸出 : 14 位精度,±10V 或者 4-20mA 輸出,電流輸出最大負載 500 歐。
1.3 通訊接口 : RS485 執行 modbus-RTU 協議和主動發送協議。
1.4 開關量輸入、輸出 : 2 個開關量輸入和 4 個繼電器或 OC 輸出。
1.5 供電 : DC 10-36V。功耗小於 2W.
1.6 外型尺寸、開孔尺寸 :
ZB4000-DC : 98*51.5*92mm(含端子頭) 開孔 93*46.5mm
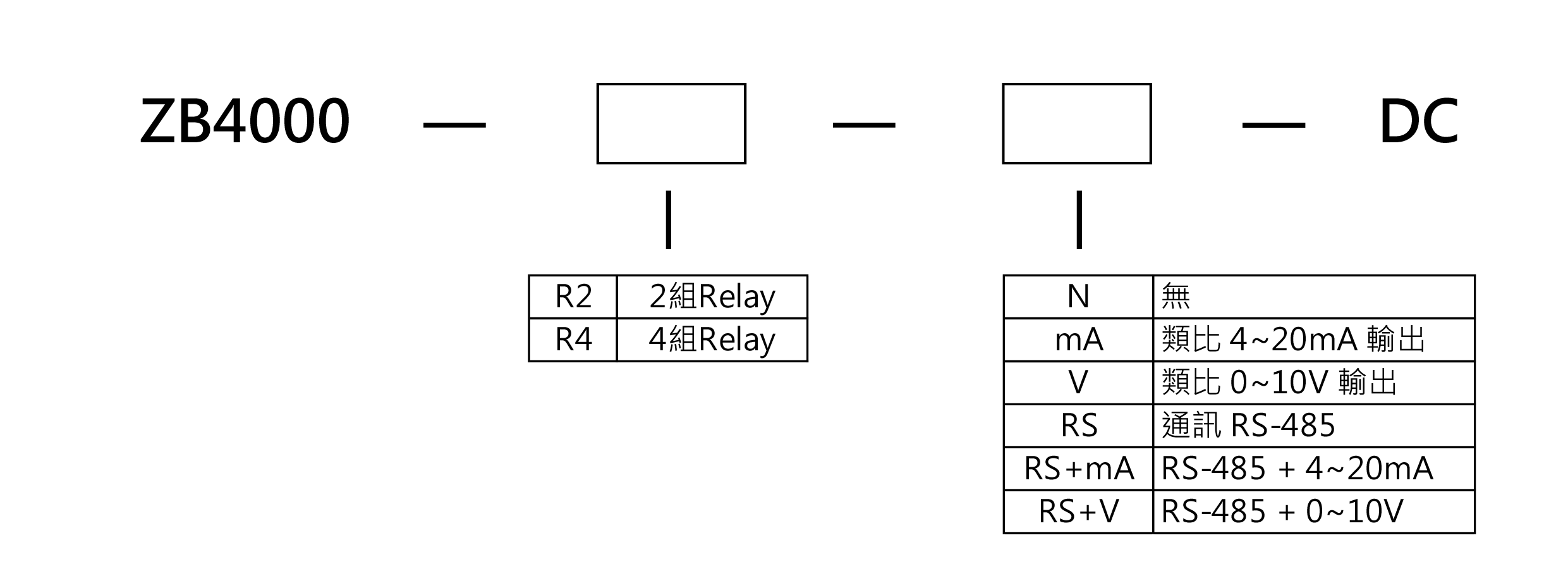
規格參數
型號說明
| ZB4000 | |
| 測量精度 | 測量精度優於0.03%,零點飄移<20ppm |
| 測量速度 | 可以設定為40次/s或者80次/s |
| 分度 | 最大顯示分度9,999,999,輸入訊號±3mV/V 內碼=1380000 |
| 傳感器激勵 | 3.3V 100mA 帶短路保護 |
| 開關量輸出 | 最多4路繼電器輸出,繼電器電阻負載驅動小於220V/2A |
| 開關量輸入 | 2個開關量輸入,下拉有效 |
| 模擬輸出 | 1路變送輸出,14位精度,可選±10V~±10V,0-10V, 4-20mA輸出 |
| 通訊 | 可選RS485或者RS232,支援Modbus-RTU協議 |
| 供電 | DC10-36V,功耗小於2W |
| 使用環境 | 使用環境-70℃,濕度5-95%(不結露) |
型號說明
2. 端子定義
2.1 ZB4000-DC 端子定義及接線圖 (使用 3.81mm 間距端子)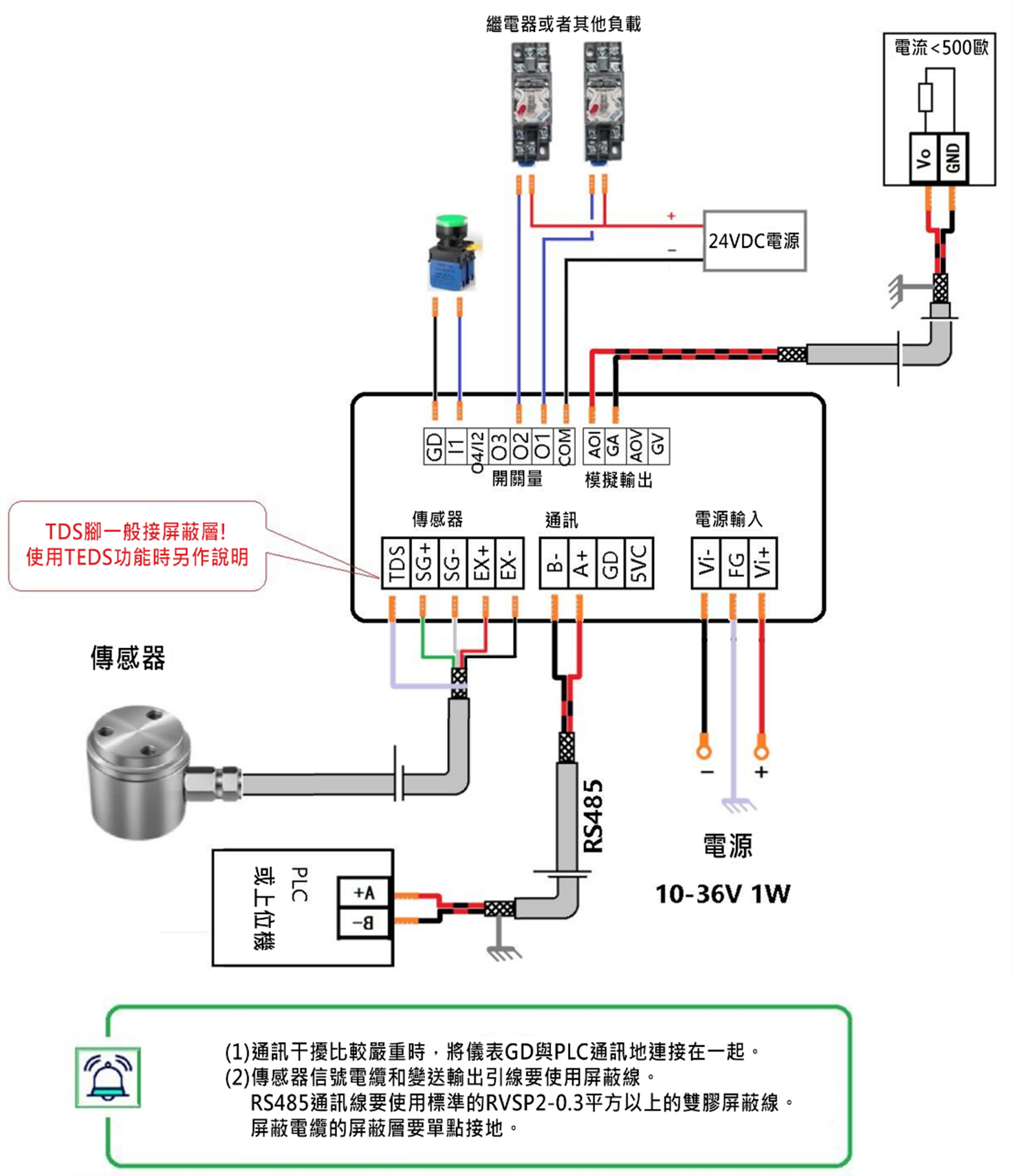
3. 功能簡介
3.1 清零功能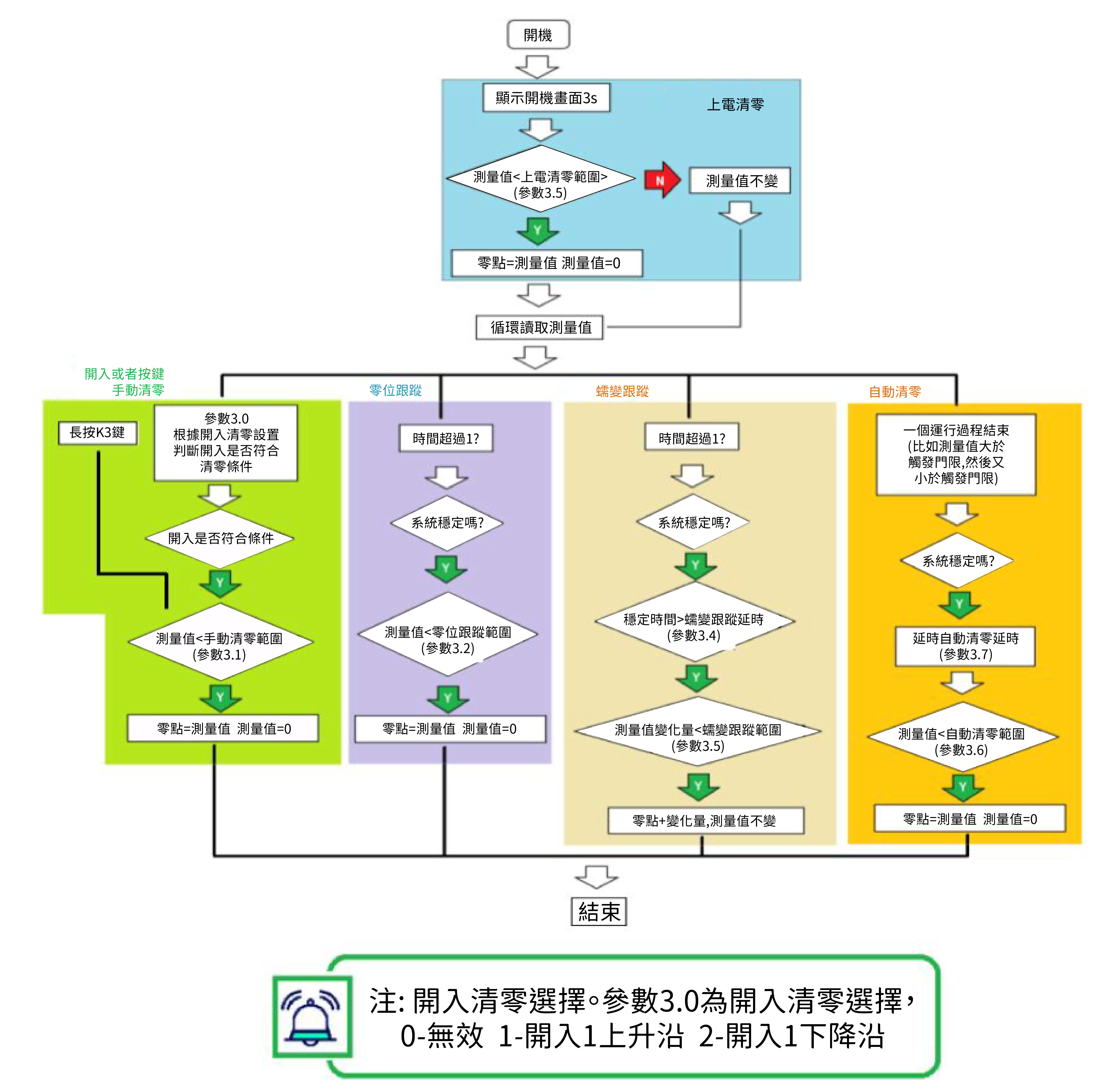
3.2 上下限比較及峰值捕獲
在預設模式下,上下限比較和峰值捕獲功能在開始條件(參數 2.0)滿足後再延時啟動延時 (參數 2.4 T_R_DL)後開始運行,在結束條件(參數 2.2)有效時結束運行。而輸出警報狀 態也可以根據需要選擇即時值上限警報、下限警報、峰谷值上限警報或者下限警報(參數 1.0)。
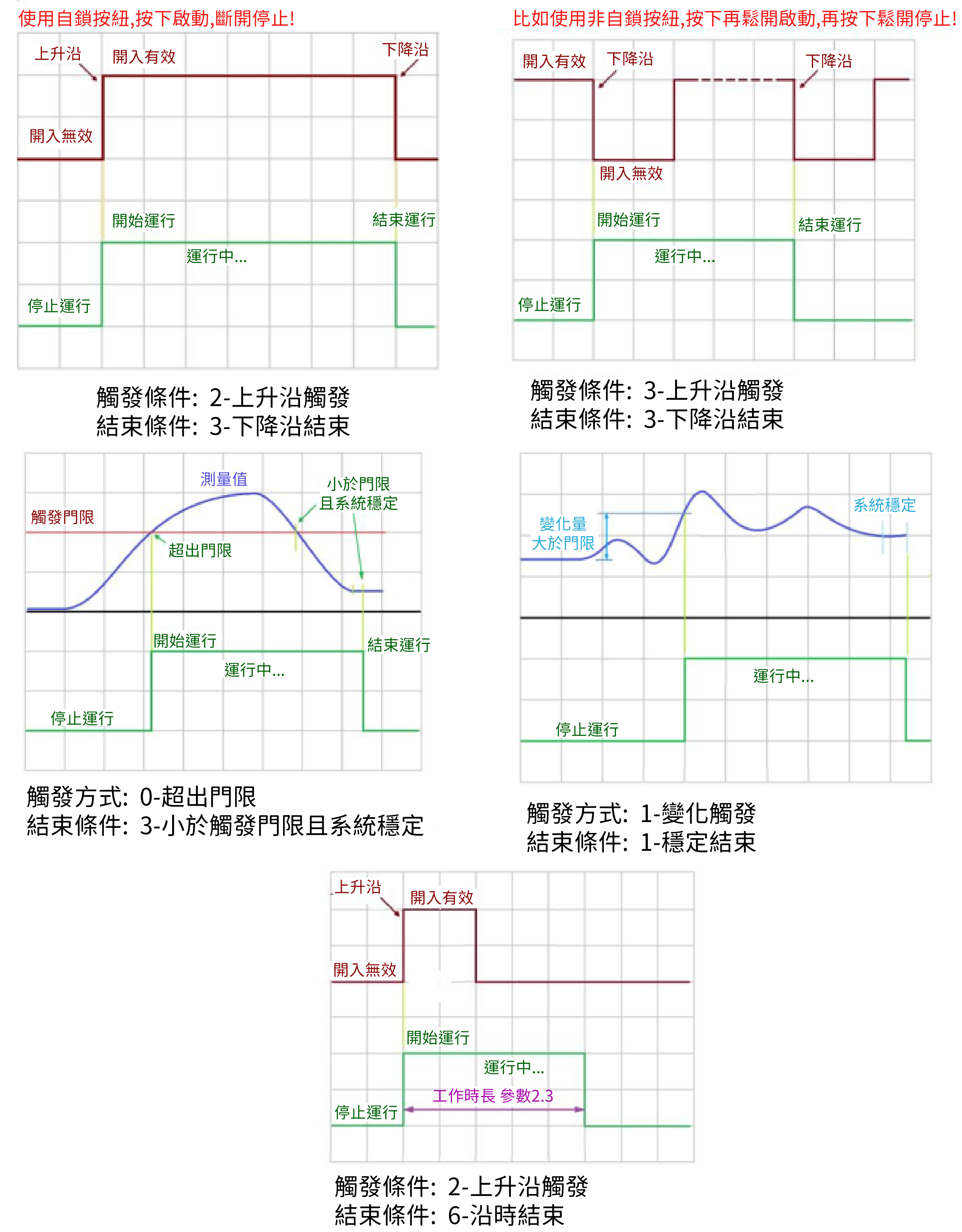
●開始條件、結束條件。
開始條件(參數 2.0):0-超出門限觸發 1-測量值變化(不穩定)觸發 2-開入 1 上升沿
(無效變成有效)3-開入 1 下降沿觸發(有效變成無效)
結束條件:結束條件 0-小於門限+穩定 1-穩定 2-開入 1 上升沿 3-開入 1 下降沿 4-開入 2 上升 5-開入 2 下降 6-延時結束
儀表有 4 個比較限,最多 4 路輸出,每路輸出可以設定單獨為上下限警報,兩個輸出(包括兩個比較限)可以組合用於期間比較、峰谷值比較。參數 1.0 為警報發送設定,個位對應第 1 路輸出(和 SP1)、十位對應第 2 路、百位對應第 3 路、千位對應第 4 路。各位的數字定義如下:
0-無效
1-下限
2-上限
3-期間內
4-期間外(3-4 一起使用)
5、6-峰值上下限
7、8-谷值上下限(56 和 78 也是成組使用)
例如:
- 上下限比較:第 1-2 路為下限比較,第 3 路為上限比較,則可以設定參數 1.0=211
當測量值 ≤ SP1 時,輸出 1 有效;測量值 > SP1+靈敏度(參數 1.5)時復位
當測量值 ≤ SP2 時,輸出 2 有效;測量值 > SP2+靈敏度(參數 1.5)時復位
當測量值 ≥ SP3 時,輸出… - 區間比較:參數 1.0=43,則 SP1 為期間比較上限,SP2 為期間比較下限
當 SP1 ≥ 測量值 ≥ SP2(測量值在 SP1~SP2 之間)時,輸出 1 有效
當測量值 > SP1 或測量值 < SP2(在 SP1~SP2 區間之外)時,輸出 2 有效
如果參數 1.0=34,則區間內輸出 2 有效,區間外輸出 1 有效 - 峰值比較:參數 1.0=56 為峰值上下比較,SP1 為上限,SP2 為下限
當 SP1 ≥ 峰值 ≥ SP2(區間內)時,輸出 2 有效
當峰值 > SP1 或峰值 < SP2 時,輸出 1 有效 - 谷值比較:參數 1.0=78 為谷值比較,SP1 為上限,SP2 為下限當 SP1 ≥ 谷值 ≥ SP2(區間內)時,輸出 2 有效
當谷值 > SP1 或谷值 < SP2 時,輸出 1 有效
●警報復位
對於峰值谷值警報(警報模式 4-6,詳見警報模式部分),警報輸出有效後還需要一個復位信號。儀表可以設定多種復位方式,具體包括:
0-下一週期開始自動復位 1-延遲「警報延遲(T_AL)」時間後自動復位 2-開入 1 上升沿(電平)復位 3-開入 1 下降沿復位 4-開入 2 上升沿復位 5-開入 2 下降沿復位
3.3 變送輸出
當參數 7.0 為 1 時,儀表的變送輸出受測量值控制。具體輸出與以下參數及即時值有關:
A(模擬輸出 0-16383)=(A1-A0) × (F-F0) ÷ (F1-F0) + A0
3.4偏置功能
當測量值大於偏置門限時(參數 4.7),儀表會自動對測量結果進行偏置修正,此時的顯示值按照以下公式計算:顯示值 = 測量值 + 偏置值(參數 4.8)當偏置值參數為 0 時,該功能無效。
3.5非線性修正
使用非線性修正前首先應對系統進行測試,即在系統有效測量範圍內由小到大選擇 2~10 個修正點,在測量點附近施加負載,記錄真實值和儀表顯示值,然後依次輸入儀表,並將非線性修正允許參數(參數 8.J)設置為有效(ENA_LINE)。當 8.J 設置為 0 時(修正無效),非線性修正資料會自動隱藏。也可藉助本公司專用手持儀進行自動修正。
.png)
顯示符號和對應的字符
對於峰值谷值警報(警報模式 4-6,詳見警報模式部分),警報輸出有效後還需要一個復位信號。儀表可以設定多種復位方式,具體包括:
0-下一週期開始自動復位 1-延遲「警報延遲(T_AL)」時間後自動復位 2-開入 1 上升沿(電平)復位 3-開入 1 下降沿復位 4-開入 2 上升沿復位 5-開入 2 下降沿復位
3.3 變送輸出
當參數 7.0 為 1 時,儀表的變送輸出受測量值控制。具體輸出與以下參數及即時值有關:
- 模擬輸出零點參數 7.1(A0)
- 模擬輸出滿度參數 7.2(A1)
- 模擬輸出零點對應的測量值參數 7.3(F0)
- 模擬輸出滿度對應的測量值參數 7.4(F1)
A(模擬輸出 0-16383)=(A1-A0) × (F-F0) ÷ (F1-F0) + A0
3.4偏置功能
當測量值大於偏置門限時(參數 4.7),儀表會自動對測量結果進行偏置修正,此時的顯示值按照以下公式計算:顯示值 = 測量值 + 偏置值(參數 4.8)當偏置值參數為 0 時,該功能無效。
3.5非線性修正
使用非線性修正前首先應對系統進行測試,即在系統有效測量範圍內由小到大選擇 2~10 個修正點,在測量點附近施加負載,記錄真實值和儀表顯示值,然後依次輸入儀表,並將非線性修正允許參數(參數 8.J)設置為有效(ENA_LINE)。當 8.J 設置為 0 時(修正無效),非線性修正資料會自動隱藏。也可藉助本公司專用手持儀進行自動修正。
4. 儀表操作
4.1 顯示及按鍵| 按鍵 | 主畫面狀態 | 數據輸入狀態 | 其他 |
 |
翻頁 | 增加 | 選擇 |
 |
長按進入標定功能 | 右移 | |
 |
長按清零 | 退出 | |
 |
長按進入參數修改 | 確認輸入 |
顯示符號和對應的字符

4.2 參數修改
●按
按鍵進入參數修改。首先提示「SET PW?」,延遲 2 秒後進入密碼輸入介面。普通參數修改的初始密碼為 0,高級參數的初始密碼為 1111。●密碼的輸入步驟。進入密碼輸入時,儀表顯示 000000,左邊第一位數閃爍,閃爍位即為當前修改位,按
當前位加 1,加到 9 後回 0,當前位修改好後按鍵當前位固定不變,第二位開始閃爍,使用可以對第二位進行修改,依此類推。最後一位修改完成後再次按又返回第一位。其他數據的輸入與密碼輸入方法類似。輸入完成後按確認,如果輸入密碼正確自動進入參數修改畫面。
●選擇需要修改的參數。密碼輸入正確後,儀表進入參數修改的第一步:參數選擇。此時儀表顯示參數序號和參數名稱(字元縮寫),使用鍵可以切換到下一個參數,鍵可以切換到下一類參數。選擇好要修改的參數後按進入參數修改的第二步:數據輸入。
●新數據輸入。新數據的輸入方法與密碼輸入類似,如果是在最高位(最左邊)閃爍狀態且數據輸入的範圍是雙向的(正負),在輸入達到最大值時會自動切換到反向(即正負號的切
換)。輸入完成後按自動儲存當前修改並返回到上一步。按放棄當前輸入並返回到上一步。
●返回。在第一步,即參數選擇時按可以退出參數修改。
4.3 量程校準
●硬件校準。儀表出廠前需要進行硬體校準(該功能一般不需要客戶操作)。
方法如下:進入參數修改(輸入高級密碼),翻到 5.1 參數「0mv_AD」,按確認鍵 K4,儀表顯示當前 AD 碼值。給儀表輸入 0mv 信號,待顯示穩定後按 K1,即可完成零位校準。
接著翻到 5.2 參數「2mv_AD」,按 K4,儀表顯示當前 AD 碼值。給儀表輸入 2mv/v 的信號,按 K1 完成滿度校準。
●數字校準(無法碼校準)。先將 5.6 COEFF 修正係數改為 1,然後輸入感測器的量程和靈敏度後,儀表會自動計算量程係數。如果測量值仍然不準確(例如感測器靈敏度不準確或多只感測
器並聯使用等情況),則可以透過 5.6 COEFF 進行修正,或者使用砝碼校準功能進行校準。
●砝碼校準。這種校準方法是最準確的,有條件的現場,在系統使用前要進行砝碼校準。儀表在主畫面(開機後自動進入的畫面),當感測器負載為 0 時(此時顯示值不為 0),長按清
零,然後給感測器加一定負載(超過 100 個分度),待顯示穩定後,按鍵進入校準畫面,並輸入真實負載,然後按確認即可。
儀表的 485 串口支援 3 種通訊協議,一種是標準的 Modbus-RTU 協議,透過交互操作完成測量值的讀取、參數修改以及清零等常規操作。另兩種為主動發送,發送的資料皆為 ASC 碼。
主動發送的速度較快,但對上位機軟體的反應速度要求也比較高。
通訊速率從 2400 到 256000 等共 8 種不同選擇,資料格式也可選擇。三種通訊方式的資料包間隔皆受參數 6.4(T_SEND)控制。對應 Modbus-RTU 協議,資料包間隔是儀表接收到資料包到回傳資料包之間的間隔。儀表與 PLC 等速度較慢的設備通訊時,必須確保有足夠的資料包間隔,否則通訊將無法正常使用。
5.2 Modbus-RTU 協議
儀表的 Modbus-RTU 協議支援 03 讀取與 16 寫入操作命令,所有參數皆為 32 位元資料,每個參數占用 2 個連續地址,4 個位元組的資料可設定高位在前或低位在前(出廠時為高位在前)。出廠時儀表設定為 38400,資料格式為 N81。儀表的通訊參數地址請參見後附表,附表地址對應的是長整型資料,該地址 +1000 對應的是浮點數地址。
以下介紹常用功能對應的指令碼範例:
● 讀取測量值(long 資料型態)
上位機發送:01 03 01 96 00 02 c7 3d 儀表回傳:01 03 04 00 00 00 00(CRC0、CRC1)
00 00 00 00 為測量值,(CRC0、CRC1)為校驗碼。
● 讀取測量值、峰值、谷值(long 型態)
上位機發送:01 03 01 96 00 06 c6 fe(讀取測量值、峰值、谷值)儀表回傳:01 03 0c D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12(CRC0、CRC1)其中 D1~D4 為即時值,D5~D8 為峰值,D9~D12 為谷值。
01 10 01 b8 00 02 04 00 00 13 88(CRC0、CRC1) → 重量 0x00 00 13 88 = 5000 儀表回傳:01 10 01 b8 00 02(CRC0、CRC1)
第二步,上位機發出校準指令:
01 10 01 ba 00 02 04 00 00 00 65(CRC0、CRC1)儀表回傳:01 10 01 ba 00 02(CRC0、CRC1)
● 參數保存
上位機發送:01 10 01 ba 00 02 04 00 00 00 78(CRC0、CRC1) → 儲存所有資料儀表回傳:01 10 01 ba 00 02(CRC0、CRC1)
5.3 主動發送方式一會傳送 8 個位元組的測量值 ASC 資料:
6. 參數表
參數名稱紅字的為高級參數
注(1) 這部分參數在 9.9 設置有效時才顯示。
修改紀錄
20230906:補充參數說明,高級參數以黑體字標示。
20230911:新增運行畫面下方顯示內容的說明。
20230918:修改 FIR 濾波參數設定與採集速度設定說明。
20230924:補充可編程畫面的定義說明。
20231003:修改自動歸零功能,新增啟動延遲功能。
20231012:程式更新,修正非線性修正參數問題、畫面 9 顯示順序、運行觸發與停止條件圖例修改。
20231019:軟體升級為 2.0,比較處理依照三路設計。密碼修改為 0 和 1111,非線性修正參數 顯 PL01、ST01 顯示值與標準值。
20231023:核對說明書,新增預設值 (R)。
20231024:密碼改為 1111,最大值為 9999 (LZ)。
20231104:參數表中所有選擇輸入的參數未標註與數字的對應關係,通訊地址未說明浮點數地址。封面圖片已修改。
鍵可以切換到下一個參數,鍵可以切換到下一類參數。選擇好要修改的參數後按進入參數修改的第二步:數據輸入。●新數據輸入。新數據的輸入方法與密碼輸入類似,如果是在最高位(最左邊)閃爍狀態且數據輸入的範圍是雙向的(正負)
,在輸入達到最大值時會自動切換到反向(即正負號的切換)。輸入完成後按
自動儲存當前修改並返回到上一步。按放棄當前輸入並返回到上一步。●返回。在第一步,即參數選擇時按
可以退出參數修改。4.3 量程校準
●硬件校準。儀表出廠前需要進行硬體校準(該功能一般不需要客戶操作)。
方法如下:進入參數修改(輸入高級密碼),翻到 5.1 參數「0mv_AD」,按確認鍵 K4,儀表顯示當前 AD 碼值。給儀表輸入 0mv 信號,待顯示穩定後按 K1,即可完成零位校準。
接著翻到 5.2 參數「2mv_AD」,按 K4,儀表顯示當前 AD 碼值。給儀表輸入 2mv/v 的信號,按 K1 完成滿度校準。
●數字校準(無法碼校準)。先將 5.6 COEFF 修正係數改為 1,然後輸入感測器的量程和靈敏度後,儀表會自動計算量程係數。如果測量值仍然不準確(例如感測器靈敏度不準確或多只感測
器並聯使用等情況),則可以透過 5.6 COEFF 進行修正,或者使用砝碼校準功能進行校準。
●砝碼校準。這種校準方法是最準確的,有條件的現場,在系統使用前要進行砝碼校準。儀表在主畫面(開機後自動進入的畫面),當感測器負載為 0 時(此時顯示值不為 0),長按
清零,然後給感測器加一定負載(超過 100 個分度),待顯示穩定後,按
鍵進入校準畫面,並輸入真實負載,然後按確認即可。5. 通訊
5.1 通訊協議儀表的 485 串口支援 3 種通訊協議,一種是標準的 Modbus-RTU 協議,透過交互操作完成測量值的讀取、參數修改以及清零等常規操作。另兩種為主動發送,發送的資料皆為 ASC 碼。
主動發送的速度較快,但對上位機軟體的反應速度要求也比較高。
通訊速率從 2400 到 256000 等共 8 種不同選擇,資料格式也可選擇。三種通訊方式的資料包間隔皆受參數 6.4(T_SEND)控制。對應 Modbus-RTU 協議,資料包間隔是儀表接收到資料包到回傳資料包之間的間隔。儀表與 PLC 等速度較慢的設備通訊時,必須確保有足夠的資料包間隔,否則通訊將無法正常使用。
5.2 Modbus-RTU 協議
儀表的 Modbus-RTU 協議支援 03 讀取與 16 寫入操作命令,所有參數皆為 32 位元資料,每個參數占用 2 個連續地址,4 個位元組的資料可設定高位在前或低位在前(出廠時為高位在前)。出廠時儀表設定為 38400,資料格式為 N81。儀表的通訊參數地址請參見後附表,附表地址對應的是長整型資料,該地址 +1000 對應的是浮點數地址。
以下介紹常用功能對應的指令碼範例:
● 讀取測量值(long 資料型態)
上位機發送:01 03 01 96 00 02 c7 3d 儀表回傳:01 03 04 00 00 00 00(CRC0、CRC1)
00 00 00 00 為測量值,(CRC0、CRC1)為校驗碼。
● 讀取測量值、峰值、谷值(long 型態)
上位機發送:01 03 01 96 00 06 c6 fe(讀取測量值、峰值、谷值)儀表回傳:01 03 0c D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12(CRC0、CRC1)其中 D1~D4 為即時值,D5~D8 為峰值,D9~D12 為谷值。
- 修改比較限
- 清零操作
- 校準
01 10 01 b8 00 02 04 00 00 13 88(CRC0、CRC1) → 重量 0x00 00 13 88 = 5000 儀表回傳:01 10 01 b8 00 02(CRC0、CRC1)
第二步,上位機發出校準指令:
01 10 01 ba 00 02 04 00 00 00 65(CRC0、CRC1)儀表回傳:01 10 01 ba 00 02(CRC0、CRC1)
● 參數保存
上位機發送:01 10 01 ba 00 02 04 00 00 00 78(CRC0、CRC1) → 儲存所有資料儀表回傳:01 10 01 ba 00 02(CRC0、CRC1)
5.3 主動發送方式一會傳送 8 個位元組的測量值 ASC 資料:
-
- 123.456(回車 0x0d)
- ___0.456(回車 0x0d)
- __-1.456(回車 0x0d)
6. 參數表
參數名稱紅字的為高級參數
| 序號 | 參數名稱 | 顯示符號 | 初值 | 參數範圍 | 通訊地址 | 備註 |
| 1.0 | 警報設置 | MD_AL | 211 | 0-888(詳見 3.2 部分.警報模式) 0-無效;個位對應第 1 路警報輸出和「比較限 1」;十位對應第 2 路警報輸出和「比較限 2」;百位對應第 3 路警報輸出和「比較限 3」數字定義: 0-無效 1-下限 2-上限 3-期間內 4-期間外(3-4 一起使用) 5、6-峰值上下限 7、8-谷值上下限(56 和 78 也是成組使用) |
0 | |
| 1.1 | 比較限 1 | SP1 | 10.000 | -999999~9999999 單位小數點由參數 4.4、4.5 設定。 | 2 | |
| 1.2 | 比較限 2 | SP2 | 5.000 | -999999~9999999 單位小數點由參數 4.4、4.5 設定 |
4 | |
| 1.3 | 比較限 1 | SP3 | 10.000 | -999999~9999999 單位小數點由參數 4.4、4.5 設定 |
6 | |
| 1.4 | 比較限 2 | SP4 | 5.000 | -999999~9999999 單位小數點由參數 4.4、4.5 設定 |
8 |
| 1.5 | 警報靈敏度 | SEN_AL | 2 | 0-99999d | 10 | d 分度 |
| 1.6 | 警報復位方式 | MD_RAL | 1 | 0-5(見 3.2 部分-警報復位) 0-下個週期自動復位 rAL-AUto 1-延時復位 rAL-dELY 2-開入 1 上升沿 rAL-l1Up 3-開入 1 下降沿 rAL-l1-DW |
12 | |
| 1.7 | 警報延時 | T_AL | 2.0 | 0-999.9s | 14 | |
| 2.0 | 觸發方式 | MD_ST | 0 | 0-3 0-超出門限觸發(st-oVEr) 1-預測值變化(不穩定)觸發(st-l1Up) 2-開入 1 上升沿(無效變成有效)(st-l1Up) 3-開入 1 下降沿觸發(有效變成無效)(st_l1dw) |
20 | |
| 2.1 | 觸發門限 | V_ST | 0.100 | -999999~9999999(見 3.2) | 22 |
2.2 |
結束條件 | MD_SP | 0 | 0-6 0-小於門限+穩定 (sp_LESS) 1-穩定 (SP_StAb) 2-開入 1 上升沿(sp_I1-UP) 3-開入 1 下降沿 (sp_I1DW) 6-延時结束(sp_dELy) |
24 | ||
| 2.3 | 運行時長 | T_RUN | 1.000 | 0-50.000s 結束條件為”延時結束”時用 | 26 | ||
| 2.4 | 啟動延時 | T_R_DL | 0-50.000s 啟動觸發條件有效後延時該時間再開始運行 | 28 | |||
| 3.0 | 開入清零選擇 | DI_ZER | 0 | 0-無效 1-開入 1 上升沿 2-開入 1 下降沿 | 40 | ||
| 3.1 | 手動清零範圍 | S_HZER | 5.000 | 0-10000d | 42 | ||
| 3.2 | 零位跟蹤範圍 | S_Z_TR | 2 | 1-0-200d | 44 | ||
| 3.3 | 蠕變跟蹤範圍 | S_S_TR | 2 | 0-200d | 46 | ||
| 3.4 | 蠕變跟蹤延時 | T_S_TR | 10.00 | 0-99.99s | 48 | ||
| 3.5 | 上電清零範圍 | S_Z_PW | 0.050 | 0-10000d | 50 | ||
| 3.6 | 自動清零範圍 | S_Z_AU | 0.000 | 0-10000d | 52 | ||
| 3.7 | 自動清零延時 | T_Z_AU | 1.00 | 0-500.00s | 54 | ||
| 4.0 | 判穩範圍 | S_STB | 5 | 0-1000d | 60 | ||
| 4.1 | 濾波設置 | MD_FL | 11 | 個位 0-FIR 濾波無效 1-3 對應 FIR1-3 個位 0-穩定濾波無效 1-穩定濾波有效 |
62 | ||
| 4.2 | 平滑濾波 | D_FL | 10 | 1-100 數字越大濾波效果越好,延遲時間越長 |
64 | ||
| 4.3 | 模擬口設置 | AD_HZ | 2 | 測量速度設置 0-10Hz 1-20Hz | 2-80Hz | 66 | 需要重 新上電 |
| 4.4 | 顯示單位 | UNIT | 2 | 0-6:No t kg g kN | N | 68 | |
| 4.5 | 顯示小數點 | Dot | 3 | 0-3: 0, 0.0, 0.00, 0.000 | 70 | ||
| 4.7 | 偏置門限 | MOV_ST | 0.000 | 0-9999999 單位小數點由 4.4、4.5 設置 | 74 | ||
| 4.8 | 偏置值 | MOV | 0.000 | -999999~9999999 單位小數點由 4.4、4.5 設置 |
76 | ||
| 4.9 | 負值處理 | N_PRO | 0 | 0:No 不做處理 1:ABS_A 顯示、變送、控制均按照絕對值 2:ABS_AO 變送按照絕對值輸出 |
78 | ||
| 5.0 | 零點 | F_ZERO | 0.000000 | -600000~9999999(由 4.4 4.5 設置) | 90 | ||
| 5.1 | 0mv 碼值 | 0MV_AD | 0 | -60000~999999 | 92 | ||
| 5.2 | 2mv 碼值 | 2MV_AD | 1150000 | 10-9999999 | 94 | ||
| 5.3 | 傳感器靈敏度 | MV-V | 2.000000 | 0.1~9.999999mV/V | 96 | ||
| 5.4 | 傳感器量程 | S_RAN | 20.000 | 100-9999999(由 4.4 4.5 設置) | 98 | ||
| 5.5 | 傳感器供電 | U_EX | 3.300000 | 0.20000~9.999999V | 100 | ||
| 5.6 | 量程修正係數 | COEFF | 1.000000 | 0.1~9.999999 | 102 | ||
| 6.0 | 通訊模式 | MD_COM | 1 | 0:NOUSE 無效 1:MODBUS Modbus-RTU 通訊 |
110 | ||
| 2:ASEND_RT 自動上傳實時值 | |||||||
| 6.1 | 通訊格式 | DT_COM | 0 | 0-5:N81、N82、E81、E82、O81、O82 | 112 | ||
| 6.2 | 波特率 | BPS | 4 | 0-7:2400,4800,9600…..256000 | 114 | ||
| 6.3 | 地址 | ID_COM | 1 | 0-128 | 116 | ||
| 6.4 | 發送間隔 | T_SEND | 0.010 | 0.001-9.999s | 118 | ||
| 6.5 | 高低位設置 | DT_HL | 0 | 0-高位在前 1-低位在前 | 120 | ||
| 7.0 | 變送輸出源 | AO_SCR | 1 | 0-通訊控制 1-實時測量值 | 130 | ||
| 7.1 | 變送輸出零位 | AO_DA0 | 0-0x3fff | 132 | |||
| 7.2 | 變送輸出滿度 | AO_DA1 | 100-0x3fff | 134 | |||
| 7.3 | 變送零點力值 | AO_F0 | 0.000 | -999999~9999999 (單位、小數點由 4.4 4.5 設置) |
136 | ||
| 7.4 | 變送滿度力值 | AO_F1 | 50.000 | -999999~9999999 (單位、小數點由 4.4 4.5 設置) |
138 | ||
| 8.1 | 主畫面設置 | PPRO | 54321 | 1-999999,下排顯示内容編程,個位對應運行畫面 1,十位對應畫面 2...可以顯示的内容和編程參見 7 附表右側說明 | 142 | ||
| 8.2 | 普通密碼 | PAS1 | 0 | 0-9999 | 144 | ||
| 8.3 | 高級密碼 | PAS2 | 1111 | 0-9999 | 146 | ||
| 8.4 | 標定密碼 | PAS3 | 0 | 0-9999 | 148 | ||
| 8.5 | 多功能碼 | FUNC | 0 | 11=恢復出廠 20=數據備份 30=恢復備份 | 150 | ||
| 8.J | 非線性修正 | LINE | 0 | 0:DIS_LINE 關閉非線性修正 1:ENA_LINE 打開非線性修正 |
178 | ||
| 9.0 | 顯示值 1 | PL01 | 9999.999 | -999999~9999999 單位小數點由 4.4 4.5 設置 | 180 | 注(1) | |
| 標準值 1 | ST01 | 9999.999 | -999999~9999999 單位小數點由 4.4 4.5 設置 | 182 | |||
| … | |||||||
| 顯示值 10 | PL10 | 9999.999 | -999999~9999999 (由 4.4 4.5 設置) | 216 | |||
| 標準值 10 | ST10 | 9999.999 | -999999~9999999 (由 4.4 4.5 設置) | 218 | |||
7. 提示信息說明
| 提示信息 | 說明 | 下排提示信息 | 編程序号+說明 |
| On- - | 上電初始化 | rUn kg | 1.運行狀態+單位 |
| rdy- | 待機狀態 | P 12345 | 2.下排顯示峰值 |
| rUn | 運行中 | V 12345 | 3.下排顯示谷值 |
| oUt | 警報輸出 | F 12345 | 4.非線性修正前的測量值 |
| sEt_pw? | 輸入參數修改密碼 | AD 12345 | 5.内碼值 |
| --quit-- | 退出 | DA 1234 | 6.變送輸出碼值 |
| Pw out | 斷電重啟 | C 123 | 7.運行計數值 |
| cAL-pw | 輸出校準密碼 | mV 1.222 | 8.傳感器輸出 mv 值 |
| InPUt.. | 輸入數據 | S.1 oooo | 9.開入(1) 開出狀態(4) |
| Er-ovEr | 結果超出範圍 | ||
| Er-LittE | 重量太小 | ||
| tEst | 接口測試功能 | ||
| K4-nExt | 按 K4 下一項 | ||
20230906:補充參數說明,高級參數以黑體字標示。
20230911:新增運行畫面下方顯示內容的說明。
20230918:修改 FIR 濾波參數設定與採集速度設定說明。
20230924:補充可編程畫面的定義說明。
20231003:修改自動歸零功能,新增啟動延遲功能。
20231012:程式更新,修正非線性修正參數問題、畫面 9 顯示順序、運行觸發與停止條件圖例修改。
20231019:軟體升級為 2.0,比較處理依照三路設計。密碼修改為 0 和 1111,非線性修正參數 顯 PL01、ST01 顯示值與標準值。
20231023:核對說明書,新增預設值 (R)。
20231024:密碼改為 1111,最大值為 9999 (LZ)。
20231104:參數表中所有選擇輸入的參數未標註與數字的對應關係,通訊地址未說明浮點數地址。封面圖片已修改。